|
ARMEBS4
revision-26.06.2015
|
|
ARMEBS4
revision-26.06.2015
|
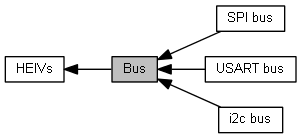
Bus abstraction layer. More...
|
Modules | |
| SPI bus | |
| SPI (Serial Peripheral Interface) bus. | |
| USART bus | |
| USART (Universal Synchronous Asynchronous Receiver Transmitter) bus.USART or UART implements the RS232 specification. | |
| i2c bus | |
| i2c bus. | |
Data Structures | |
| struct | heivs_bus_var_t |
| Variable part of the bus description. More... | |
| struct | heivs_bus_t |
| Bus handler. More... | |
Macros | |
| #define | BUS_PARANOIA |
Enumerations | |
| enum | heivs_bus_state_t { BUS_NOINIT, BUS_INACTIVE, BUS_ACTIVE, BUS_SUSPENDED } |
| State of the bus. More... | |
Functions | |
| status_e | bus_init (const struct heivs_bus_t *bus) |
| initialize the bus More... | |
| status_e | bus_get (const struct heivs_bus_t *bus) |
| Get exclusive access to the bus. More... | |
| status_e | bus_release (const struct heivs_bus_t *bus) |
| Release exclusive access to the bus. More... | |
| status_e | bus_suspend (const struct heivs_bus_t *bus) |
| Suspend the bus (low power mode) More... | |
| status_e | bus_resume (const struct heivs_bus_t *bus) |
| Resume the bus (from low power mode) More... | |
| status_e | bus_read (const struct heivs_bus_t *bus, uint32_t address, void *data, size_t len, size_t *rlen) |
| Resume the bus (from low power mode) More... | |
| status_e | bus_write (const struct heivs_bus_t *bus, uint32_t address, const void *data, size_t len) |
| Write data to the bus. More... | |
| status_e | bus_writeread (const struct heivs_bus_t *bus, uint32_t address, const void *src, size_t src_len, void *dst, size_t dst_len, size_t *rlen) |
| Combined write and read data. More... | |
Bus abstraction layer.
This abstraction will be used to hide bus (i2c, spi, ...) behind a easy to use interface
| enum heivs_bus_state_t |
State of the bus.
| Enumerator | |
|---|---|
| BUS_NOINIT |
Bus never initialized Choosen value is zero because C uninitialized variables are zeros
|
| BUS_INACTIVE |
Initialized, but free to use
|
| BUS_ACTIVE |
In use
|
| BUS_SUSPENDED |
Low power mode, use bus_init to re-enable
|
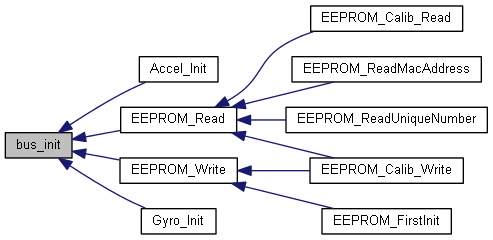
| status_e bus_init | ( | const struct heivs_bus_t * | bus | ) |
initialize the bus
| bus |
Definition at line 59 of file bus.c.
References heivs_bus_t::_init, BUS_ACTIVE, BUS_INACTIVE, BUS_NOINIT, NO_ERROR, and heivs_bus_t::var.
Referenced by Accel_Init(), EEPROM_Read(), EEPROM_Write(), and Gyro_Init().
| status_e bus_get | ( | const struct heivs_bus_t * | bus | ) |
Get exclusive access to the bus.
| bus |
Definition at line 134 of file bus.c.
References BUS_ACTIVE, BUS_INACTIVE, ERROR_BUS_BAD_STATE, NO_ERROR, and heivs_bus_t::var.
Referenced by Accel_Read(), Accel_WriteCfg(), EEPROM_Read(), EEPROM_Write(), Gyro_RD(), Gyro_Read(), Gyro_Write(), reg_read(), and reg_write().

| status_e bus_release | ( | const struct heivs_bus_t * | bus | ) |
Release exclusive access to the bus.
| bus |
Definition at line 149 of file bus.c.
References BUS_ACTIVE, BUS_INACTIVE, ERROR_BUS_BAD_STATE, NO_ERROR, and heivs_bus_t::var.
Referenced by Accel_Read(), Accel_WriteCfg(), bus_read(), bus_resume(), bus_suspend(), bus_write(), bus_writeread(), EEPROM_Read(), EEPROM_Write(), Gyro_RD(), Gyro_Read(), Gyro_Write(), reg_read(), and reg_write().

| status_e bus_suspend | ( | const struct heivs_bus_t * | bus | ) |
Suspend the bus (low power mode)
| bus |
This function will disable the bus controller, put all pins used to logical level zero to prevent power leakage.
The bus must be owned (bus_get) before suspend and can be resumed using bus_resume
Definition at line 163 of file bus.c.
References heivs_bus_t::_suspend, bus_release(), BUS_SUSPENDED, NO_ERROR, and heivs_bus_t::var.

| status_e bus_resume | ( | const struct heivs_bus_t * | bus | ) |
Resume the bus (from low power mode)
| bus |
Definition at line 180 of file bus.c.
References heivs_bus_t::_resume, BUS_ACTIVE, bus_release(), NO_ERROR, and heivs_bus_t::var.

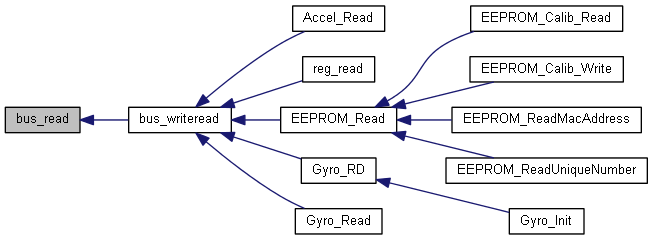
| status_e bus_read | ( | const struct heivs_bus_t * | bus, |
| uint32_t | address, | ||
| void * | data, | ||
| size_t | len, | ||
| size_t * | rlen | ||
| ) |
Resume the bus (from low power mode)
| bus |
| bus | |
| address | for i2c, the chip address, unused for spi and uart |
| data | buffer where the data will be stored |
| len | buffer len |
| rlen | effective count of read bytes, can be NULL if not interested |
Definition at line 198 of file bus.c.
References heivs_bus_t::_read, BUS_ACTIVE, bus_release(), ERROR_BAD_PARAM, and NO_ERROR.
Referenced by bus_writeread().

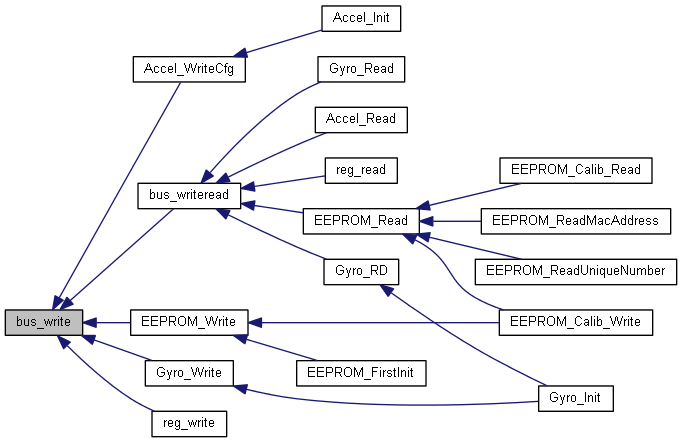
| status_e bus_write | ( | const struct heivs_bus_t * | bus, |
| uint32_t | address, | ||
| const void * | data, | ||
| size_t | len | ||
| ) |
Write data to the bus.
| bus | |
| address | for i2c, the chip address, unused for spi and uart |
| data | to be sent |
| len | of data |
Definition at line 243 of file bus.c.
References BUS_ACTIVE, bus_release(), ERROR_BAD_PARAM, and NO_ERROR.
Referenced by Accel_WriteCfg(), bus_writeread(), EEPROM_Write(), Gyro_Write(), and reg_write().

| status_e bus_writeread | ( | const struct heivs_bus_t * | bus, |
| uint32_t | address, | ||
| const void * | src, | ||
| size_t | src_len, | ||
| void * | dst, | ||
| size_t | dst_len, | ||
| size_t * | rlen | ||
| ) |
Combined write and read data.
| bus | |
| address | for i2c, the chip address, unused for spi and uart |
| src | data to be sent |
| src_len | len of src |
| dst | data to be read |
| dst_len | len of dst |
| rlen | effective count of read bytes, can be NULL if not interested |
Definition at line 279 of file bus.c.
References BUS_ACTIVE, bus_read(), bus_release(), bus_write(), ERROR_BAD_PARAM, and NO_ERROR.
Referenced by Accel_Read(), EEPROM_Read(), Gyro_RD(), Gyro_Read(), and reg_read().


 1.8.9.1
1.8.9.1

