|
ARMEBS4
revision-26.06.2015
|
|
ARMEBS4
revision-26.06.2015
|
Measures the board's rate of rotation. More...

|
Data Structures | |
| struct | gyroscope_data_t |
| Gyroscope data. More... | |
Functions | |
| status_e | Gyro_Init (void) |
| Initialise the gyroscope Accelerometer in initialised for fast acquisition. More... | |
| status_e | Gyro_Read (struct gyroscope_data_t *measure) |
| Read the X, Y and Z values from gyroscope. More... | |
| status_e | Gyro_Write (uint8_t reg, uint8_t data) |
| Write special config to accelrometer. More... | |
Measures the board's rate of rotation.

Measures the device's rate of rotation in around each of the three physical axes (x, y, and z).
This kind of device is typically used to :
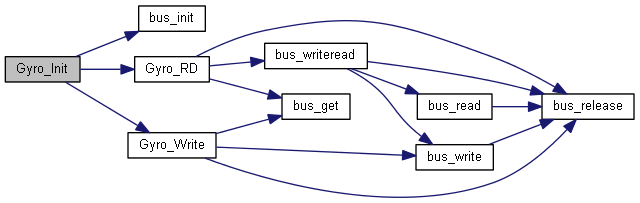
| status_e Gyro_Init | ( | void | ) |
Initialise the gyroscope Accelerometer in initialised for fast acquisition.
Definition at line 65 of file gyroscope.c.
References bus_init(), ERROR_HW_FAILED, Gyro_RD(), Gyro_Write(), and NO_ERROR.
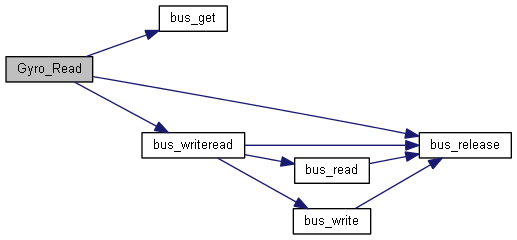
| status_e Gyro_Read | ( | struct gyroscope_data_t * | measure | ) |
Read the X, Y and Z values from gyroscope.
| measure | The measure \return NO_ERROR for no problem |
Definition at line 88 of file gyroscope.c.
References bus_get(), bus_release(), bus_writeread(), NO_ERROR, gyroscope_data_t::x, gyroscope_data_t::y, and gyroscope_data_t::z.
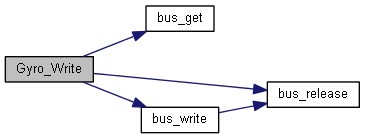
| status_e Gyro_Write | ( | uint8_t | reg, |
| uint8_t | data | ||
| ) |
Write special config to accelrometer.
| reg | Register address to write in |
| data | Data byte to write in this register |
Definition at line 113 of file gyroscope.c.
References bus_get(), bus_release(), bus_write(), and NO_ERROR.
Referenced by Gyro_Init().

 1.8.9.1
1.8.9.1

